电子商务和智能制造在21世纪飞速发展,对供应链和仓储的诸多环节提出了更高要求,移动机器人(AMR)在提供高柔性、高精度、高可靠性搬运服务的同时,更能提升原材料、成品搬运的效率,解决劳动力成本急剧增长带来的挑战,被企业主广泛接受。本文基于仓储行业的智能搬运场景中环境高频变化等难点,就移动机器人复杂环境下的感知与定位技术进行讨论,并设计了一整套高效、可灵活配置的软、硬件系统,智能的视觉激光融合感知与定位、规划与控制系统,保障了AMR在业务场景中运行的稳定性。
仓储行业的智能搬运场景中人机交互复杂,环境持续高频变化,对场内移动机器人(Autonomous Mobile Robot,AMR)的定位影响极大,尤其是在对接的场景,环境变化严重影响机器人感知能力,造成无法精确对齐等问题。使用单一导航定位技术的地面移动机器人,如磁条导航、..导航等,无法应对这些复杂的场景。仓储行业需要有强大混合导航技术的移动机器人,提升感知和定位能力,从而保证在复杂多变的场景中稳定运行。
移动机器人上配置有包括激光雷达,视觉相机等多种传感器,但在面临以下几种场景或者条件时,机器人定位、建图及运动控制等存在诸多难点:
在仓库、工厂等场景下,只有墙壁和顶梁柱等少数的固定目标,大部分为空旷空间。在远距离探测时,激光雷达扫描点云会过于稀疏,或激光帧扫到地面,形成干扰数据。深度相机的有效探测距离一般在5米内(远距离噪声较大,难以使用),如果机器人在大部分行驶路径的5米半径范围内都缺少固定物体,也将不会有深度信息反馈。相机虽然能获取到足够远的图像信息,然而从远处的图像中提取角点、线等视觉特征的难度会增加。不能仅依靠图像中的像素得到深度信息,如果计算该点的距离,需要将相机移动再进行一次观察,并根据三角测量原理进行计算。而该点的距离越远,三角测量的误差就越大,导致定位误差也会增加。
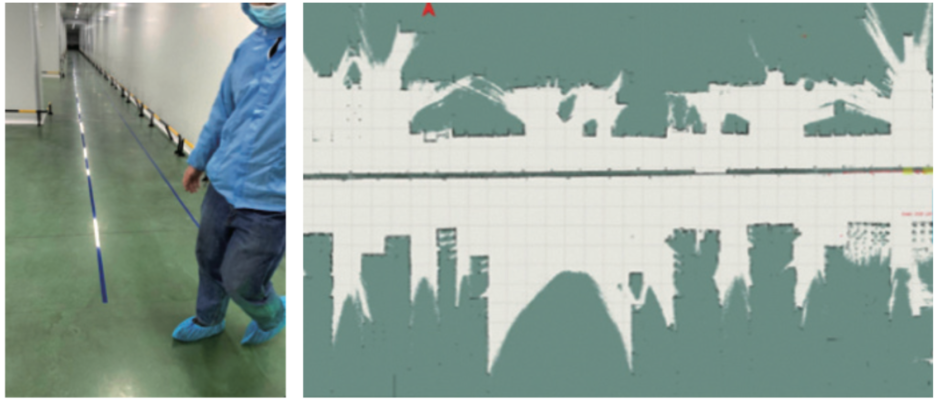
在仓储和制造业场景中,物体的动态性较高。图1可以看出左侧都是纸箱,随着任务不同,这些摆放的料箱都会发生巨大的位置变化。动态物体上的特征点会随物体移动,无法给机器人定位提供有效的约束。同时也很难从背景中区分出所有动态的物体,将动态物体上的特征点全部剔除。如果建图时将动态物体上的特征点加入地图,定位时就会因为匹配不上这些已经消失的特征点而失败。
人员的移动存在较大的不确定性,极可能会突然出现在机器人的行驶路径上。一旦出现漏检,将给人带来危险。为了能够保障人员安全,需要实时检测多个方向是否有人存在,甚至需要对人的运动轨迹进行精准预测,才能在人机混行的场景中,实现机器人安全可靠的导航。
特征重复性高的场景,对于激光定位而言,局部特征会在行驶过程中多次重复。而且有效范围内的物体大部分只有墙、柱子这种形状相似的特征,缺少独特的特征会导致定位困难,如图2所示。对于视觉建图,有多次重复的纹理也无法作为全局约束。且该场景中,足够鲁棒的角点特征少,而线特征只能提供一个方向的约束,白墙上更是无法得到丰富的特征点容易匹配错误,造成定位误差。
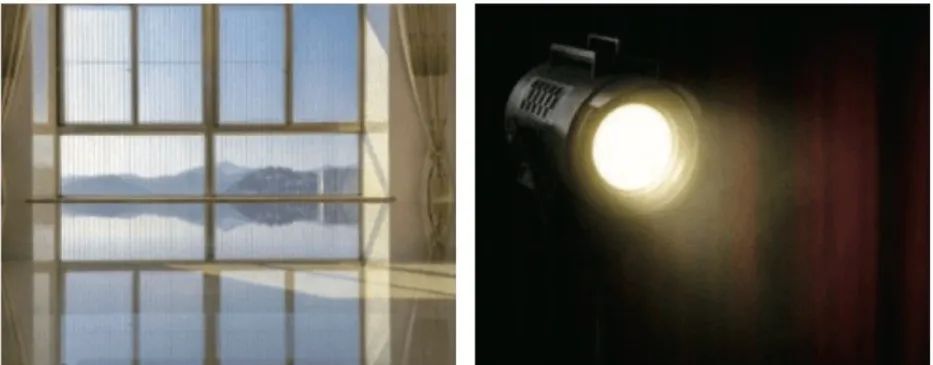
对于纯视觉方案,光照变化也是一个难以解决的问题。通常仓储物流环境中,不仅受到灯光的影响,还易受到窗户天窗等自然光照射的影响。昏暗的环境中,视觉传感器无法提取到足够的信息,同时会受噪点的干扰,影响定位结果。与此同时,视觉建图和定位时,光照条件相差比较大也会影响定位结果;甚至窗户的自然光直射镜头将会导致相机过曝,无法提取特征导致定位失败,如图3所示。
在仓储、制造业行业场景中,机器人需要精确的对准传送带。为了提高存储密度,货物的存放过于密集,导致机器人行驶的路径狭窄,容差可能是几厘米,如图4所示。这些都对机器人定位提出了较高的精度要求。
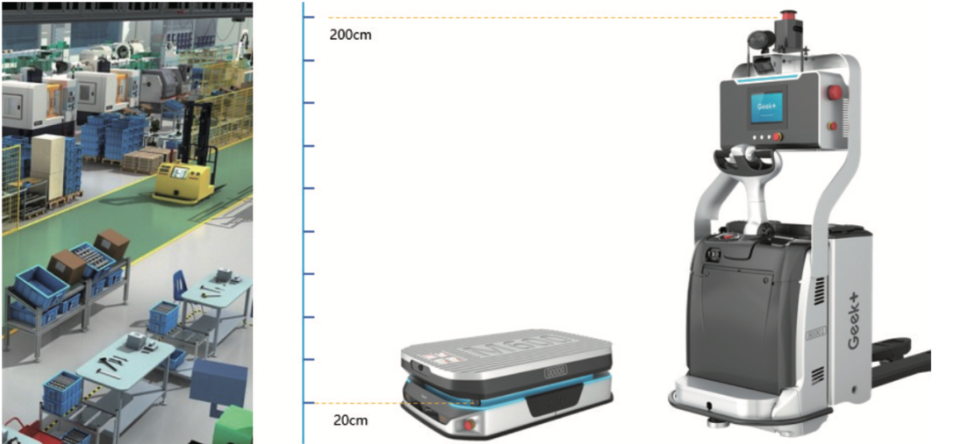
叉车与机器人激光雷达安装高度差异较大,探测高度不一致。但运行过程中需要叉车和机器人使用的地图具有相同的坐标系,以保证调度系统使用相同的点位控制机器人,如图5所示。因此,需要叉车和机器人建图具有很高的一致性与绝对精度,以保证不同种类机器人取放相同货位时,位置相同。
机器人为了完成自动化搬运,需要设计一整套的关于数据采集模块,数据处理模块,以及控制规划模块。针对包括拣选、搬运、分拣等不同产品线、不同任务形式,以及不同的传感器配置,需要合理设计系统硬件结构以及模块化的软件架构,从而达到提高开发效率,增强系统运行稳定性,并最终灵活应用到不同产品的机器人上。
图6 机器人硬件结构图
机器人硬件组成,主要包括车载控制器、电池模块、声光报警模块、通讯模块、电机驱动模块、充电模块等。同时针对不同产品的机器人以及实际运行环境,还包括定位感知相关的激光雷达、鱼眼相机、深度相机等模块等,如图6所示。通过硬件架构设计,完成不同模块的数据采集和通信。并将对应的数据送到相应的处理器,由处理器处理完成后,再将处理结果发送给相应的控制驱动模块,从而完成对应的任务。
机器人软件架构设计则通过从底层操作系统到ROS2的算法..,再到相应模块化设计的定位模块、导航模块、避障模块、传感器紧融合模块、控制模块,完成整个软件系统高效且灵活可配置的设计,最终在不同产品线机器人上得到应用。定位建图融合模块获取各子模块的定位建图结果,通过优化各模块的重投影误差达到最小,从而完成机器人的定位与建图。其中各子模块通过对数据的输入与输出接口的抽象,设置成灵活的“可插拔”的配置,针对不同产品机器人的传感器,完成对应模块的删减。感知模块接收各子模块(激光感知模块、视觉感知模块、超声感知模块)的语义及障碍物的检测信息。路径规划模块通过结构定位建图模块的定位,以及地图信息以及感知模块的障碍物以及语义信息,根据特定的任务完成机器人的规划控制。机器人通过硬件架构采集数据,并通过ROS2完成数据在各模块之间的通信。其中ROS2相对于ROS1采用数据分发服务(DDS)通信协议,它可以以零拷贝的方式传递消息,节省了CPU和内存资源,且不存在ROS1中的单点故障,从而更好保证了各模块之间数据通信的高效性与实时性。在系统整体设计方面,极智嘉的SLAM(Simultaneous Localization And Mapping)系统采用紧耦合、多源异构的方式,去使用各种传感器和定位元素的信息,如图7所示。其中,前视的相机用来识别特征点、语义线、..和各种物体(Object),算法在GPU上进行加速后,会将结果传到从CPU处理。下视的相机可以识别地面的..,来计算机器人的绝对位置,这部分的算法会在FPGA上进行优化和加速。而底层里程计和IMU的信息,从MCU上进行读取,并进行融合和算法优化。最终各个传感器的信息经过各自算法在不同的..上处理后,会统一将结果发送到主CPU处理器上,进行结果的融合和最终决策。图7 SLAM系统总体设计
激光与视觉融合的SLAM导航技术使用领先的紧耦合多传感器融合框架,从处理器芯片到激光雷达、相机、IMU和编码器等都实现了高精度的时间同步,确保所获取传感器数据的时间精确性。该技术的关键点包括:
极智嘉机器人出厂前使用自主研发的标定设备对传感器的内参、外参进行严格检校,加上在线标定算法,现已可实现数月以上的运动轨迹重复一致,如图8所示。无论环境如何变化,都能顺利精准完成产线对接,保障产线可持续性。目前机器人多采用机械旋转式激光雷达,每个扫描帧获取的时间从几十到上百毫秒不等,在机器人高速运动时激光扫描帧易变形。极智嘉SLAM算法中使用IMU和轮速数据,对激光雷达扫描帧进行运动补偿,从而解决了机器人高速运动时轨迹偏离的问题,如图9所示。
图9 激光畸变校正前(左)畸变校正后(右)对比
目前行业内主要依靠人工对变化的地图进行修正,无法实现动态更新地图功能。极智嘉SLAM通过滑窗优化(Sliding Window BA)和边缘化(Marginalization)技术,在保障地图和定位精度前提下,裁剪掉“过时”的节点和地图观测数据,有效控制图(Graph)的规模,如图10所示。通过这一业界领先的在线地图动态更新技术创新,极智嘉的搬运方案保障了地图新鲜度,真正实现了动态环境感知和高可靠的定位效果,保证机器人长期稳定运行。
不同于传统的V-SLAM系统,极智嘉的VX-SLAM系统使用的是多种层次的视觉特征。在建图的过程中,除了使用传统方法检测点(Point)、线 (Line)和区域 (Region),还会使用实例分割(Instance Segmentation)方法对视野的对象进行分割和分类,并根据实例分割的结果进行动态物体的滤除,将静态物体作为一个约束加入位姿和地图的优化,最终的地图则是点特征地图、线特征地图、对象地图、特殊区域地图等地图的叠加态。另一方面,VX-SLAM系统融合了机器人上多个传感器,惯性测量单元(IMU)和 Odom 坐标系提供了短时间内精确的相对位姿估计,而激光雷达和摄像头的闭环检测(Loop Closure)和重定位(Relocalization)则用以消除累计的误差,同时融合激光雷达和摄像头可同时利用环境的结构特征和外观特征,使得VX-SLAM系统具有极高的鲁棒性。VX-SLAM系统会输出高精度的视觉地图和激光地图,并会自动将这两个地图进行配准,对齐和融合。在进行定位的时候,视觉输出的重定位结果会和里程计,IMU的位姿递推结果融合,在复杂、多变的环境下实现高可靠性与高精度定位,如图11所示。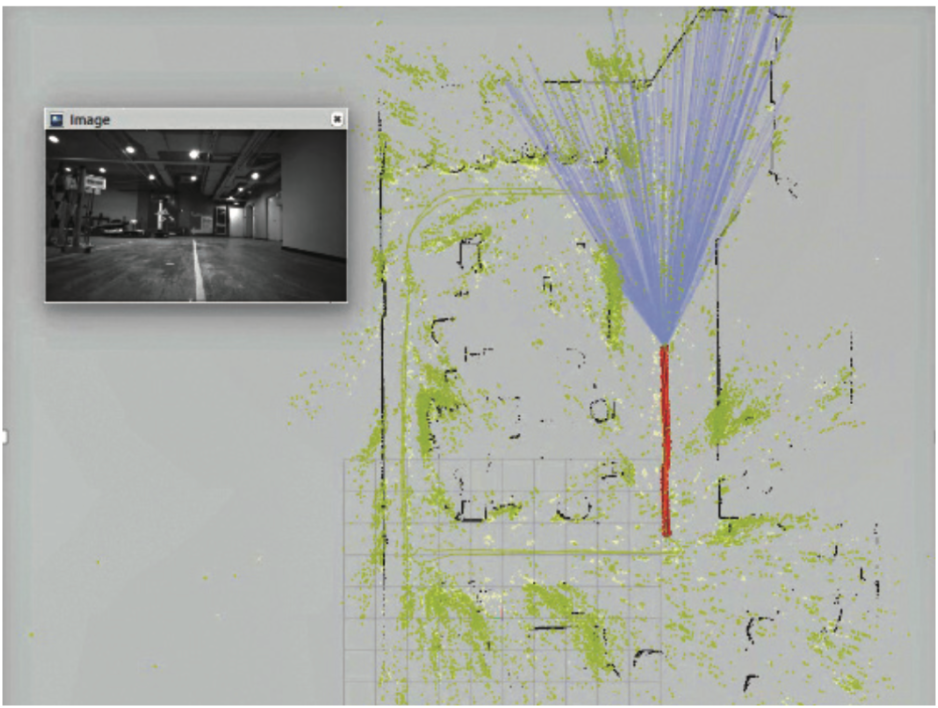
图11 基于视觉的重定位
为实现叉车与机器人统一调度,需要融合叉车与机器人构建的SLAM地图。创建地图时,使用识别到的墙壁、立柱等特征,拉齐两个地图的坐标系,可以解决可观测区域不同的问题,如图12所示。此外,使用多传感器融合的定位方案和自动化的标定方案,保证各种类型机器人具有相同的绝对精度。
标签: